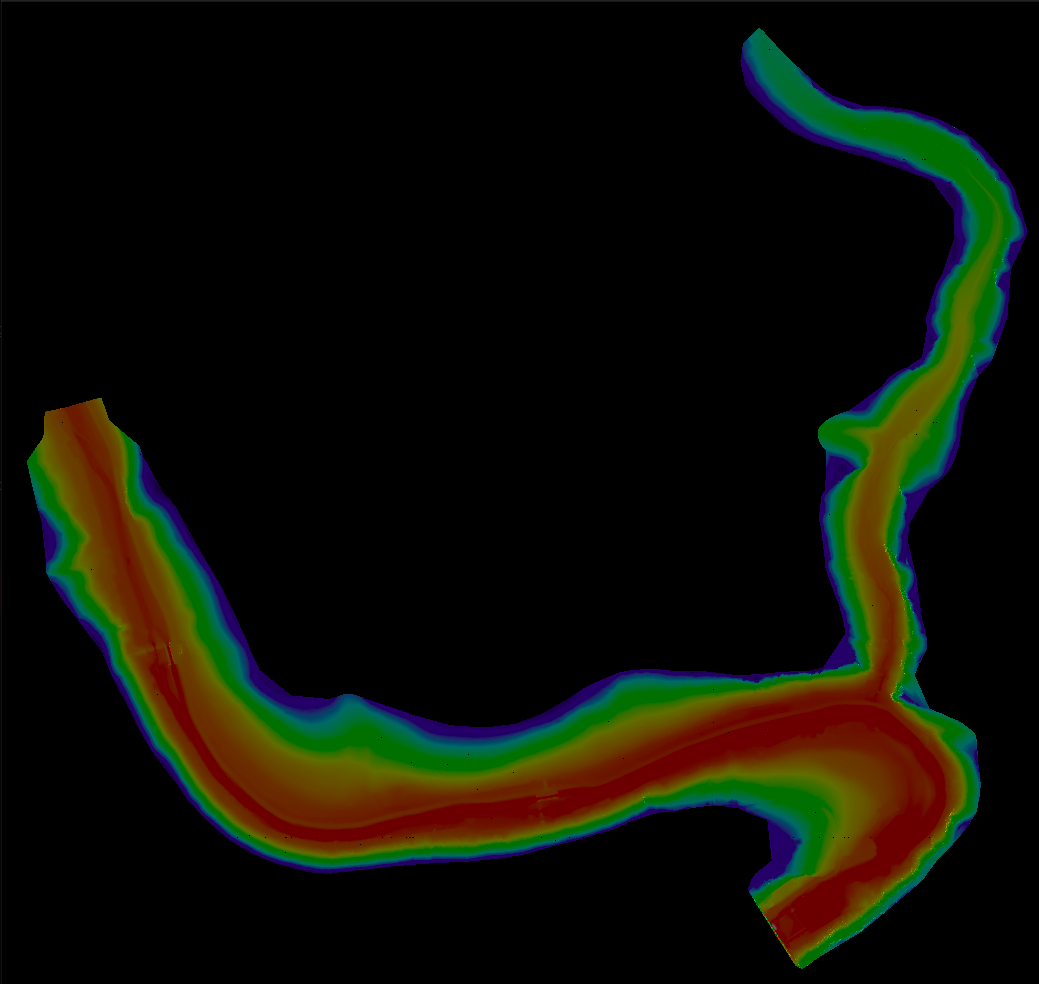
Terrain Rasterizer
Conversion of GPS data into 2.5D topographic maps
Loading...
Searching...
No Matches
MNT.hpp
1
#ifndef MNT_HPP
2
#define MNT_HPP
3
4
#include <string>
5
#include <vector>
6
11
struct
Point
{
12
double
x
;
13
double
y
;
14
double
z
;
15
};
16
27
std::vector<Point> lireEtConvertir(
const
std::string &nomFichier);
28
29
#endif
// MNT_HPP
Point
Represents a point in 3D space.
Definition
MNT.hpp:11
Point::z
double z
Definition
MNT.hpp:14
Point::x
double x
Definition
MNT.hpp:12
Point::y
double y
Definition
MNT.hpp:13
include
MNT.hpp
Generated by
1.9.8